Implementation of LU factorization of complex (variable-sized) matricies for CUDA. More...
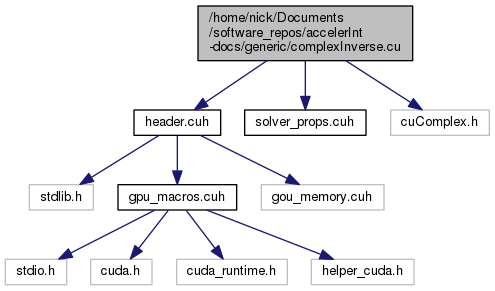
Go to the source code of this file.
Functions | |
| __device__ int | getComplexMax (const int n, const cuDoubleComplex *__restrict__ complexArr) |
| getComplexMax finds the index of the first element having maximum absolute value. More... | |
| __device__ void | scaleComplex (const int n, const cuDoubleComplex val, cuDoubleComplex *__restrict__ arrX) |
| scaleComplex scales a vector (with increment equal to one) by a constant val. More... | |
| __device__ void | complexGERU (const int n, const cuDoubleComplex alpha, const cuDoubleComplex *arrX, const cuDoubleComplex *arrY, const int incY, cuDoubleComplex *A, const int lda) |
| complexGERU performs the rank 1 operation \(A := alpha * arrX * arrY **T + A\) where alpha is a scalar, arrX and arrY are n element vectors, and A is a (lda x n) matrix More... | |
| __device__ void | multiplyComplexUpperMV (const int n, cuDoubleComplex *x, const int lda, const cuDoubleComplex *A) |
| Performs the matrix-vector operation \(x_v:= A*x_v\). More... | |
| __device__ void | complexGEMV (const int m, const int n, const int lda, const cuDoubleComplex alpha, const cuDoubleComplex *A, const cuDoubleComplex *arrX, cuDoubleComplex *arrY) |
| Computes the matrix-vector operation \(alpha*A*x + y\) where alpha is a scalar, x and y are vectors and A is an m by n matrix. More... | |
| __device__ void | getComplexLU (const int n, cuDoubleComplex *__restrict__ A, int *__restrict__ indPivot, int *__restrict__ info) |
| Computes the LU factorization of a (n x n) matrix using partial pivoting with row interchanges. More... | |
| __device__ int | getComplexInverseLU (const int n, cuDoubleComplex *__restrict__ A, const int *__restrict__ indPivot, cuDoubleComplex *__restrict__ work) |
| getComplexInverseLU computes the inverse of a matrix using the LU factorization computed by getHessenbergLU or getComplexLU. More... | |
| __device__ void | getComplexInverse (const int n, cuDoubleComplex *__restrict__ A, int *__restrict__ ipiv, int *__restrict__ info, cuDoubleComplex *__restrict__ work) |
| getComplexInverse computes the inverse of an a general matrix A using a LU factorization method More... | |
| __device__ void | getHessenbergLU (const int n, cuDoubleComplex *A, int *__restrict__ indPivot, int *__restrict__ info) |
| Computes the LU factorization of a (n x STRIDE) Hessenberg Matrix using partial pivoting with row interchanges. More... | |
| __device__ void | getComplexInverseHessenberg (const int n, cuDoubleComplex *__restrict__ A, int *__restrict__ ipiv, int *__restrict__ info, cuDoubleComplex *__restrict__ work) |
| getComplexInverseHessenberg computes the inverse of an upper Hessenberg matrix A using a LU factorization method More... | |
Detailed Description
Implementation of LU factorization of complex (variable-sized) matricies for CUDA.
Adapted from Lapack LU factorization and inversion routines
Definition in file complexInverse.cu.
Function Documentation
◆ complexGEMV()
| __device__ void complexGEMV | ( | const int | m, |
| const int | n, | ||
| const int | lda, | ||
| const cuDoubleComplex | alpha, | ||
| const cuDoubleComplex * | A, | ||
| const cuDoubleComplex * | arrX, | ||
| cuDoubleComplex * | arrY | ||
| ) |
Computes the matrix-vector operation \(alpha*A*x + y\) where alpha is a scalar, x and y are vectors and A is an m by n matrix.
- Parameters
-
[in] m On entry, M specifies the number of rows of the matrix A. Must be >= 0 [out] n On entry, N specifies the number of columns of the matrix A. Must be >= 0 [in] lda The stride of the matrix
- See also
- STRIDE
- Parameters
-
[in] alpha The scalar value [in] A A is an array of dimension (lda, n). Before entry, the leading m by n part of the array A must contain the matrix of coefficients. [in] arrX arrX is an array of dimension at least (n) Before entry, the incremented array arrX must contain the vector x. [in,out] arrY arrY is an array of dimension at least (m). Before entry, the incremented array arrY must contain the vector y. On exit, arrY is overwritten by the updated vector y.
Note: These pointers cannot use the __restrict__ modifier, as they may overlap
Definition at line 176 of file complexInverse.cu.
◆ complexGERU()
| __device__ void complexGERU | ( | const int | n, |
| const cuDoubleComplex | alpha, | ||
| const cuDoubleComplex * | arrX, | ||
| const cuDoubleComplex * | arrY, | ||
| const int | incY, | ||
| cuDoubleComplex * | A, | ||
| const int | lda | ||
| ) |
complexGERU performs the rank 1 operation \(A := alpha * arrX * arrY **T + A\) where alpha is a scalar, arrX and arrY are n element vectors, and A is a (lda x n) matrix
- Parameters
-
[in] n The matrix/vector size [in] alpha The value to scale by [in] arrX arrX is an array of dimension at least n. Before entry, the incremented array arrX must contain the n element vector x. [in] arrY arrY is an array of dimension at least 1 + (n - 1) * incY. Before entry, the incremented array arrY must contain the n element vector y. [in] incY On entry, INCY specifies the increment for the elements of arrY. incY must not be zero. [out] A A is an array of dimension (lda x n). Before entry, the leading n by n part of the array A must contain the matrix of coefficients. On exit, A is overwritten by the updated matrix. [in] lda On entry, lda specifies the first dimension of A as declared in the calling (sub) program. lda must be at least max( 1, n ).
Definition at line 102 of file complexInverse.cu.
◆ getComplexInverse()
| __device__ void getComplexInverse | ( | const int | n, |
| cuDoubleComplex *__restrict__ | A, | ||
| int *__restrict__ | ipiv, | ||
| int *__restrict__ | info, | ||
| cuDoubleComplex *__restrict__ | work | ||
| ) |
getComplexInverse computes the inverse of an a general matrix A using a LU factorization method
- Parameters
-
[in] n The order of the matrix A. n >= 0. [in,out] A The array, dimension (STRIDE, n)
- See also
- STRIDE
- Parameters
-
[out] ipiv ipiv is an array of dimension (n). The pivot indices from getHessenbergLU; for 0<=i<=n-1, row i of the matrix was interchanged with row indPiv[i]. [out] info If not zero, an error occured during facotrization [out] work A work array that will be overwritten
Definition at line 332 of file complexInverse.cu.
◆ getComplexInverseHessenberg()
| __device__ void getComplexInverseHessenberg | ( | const int | n, |
| cuDoubleComplex *__restrict__ | A, | ||
| int *__restrict__ | ipiv, | ||
| int *__restrict__ | info, | ||
| cuDoubleComplex *__restrict__ | work | ||
| ) |
getComplexInverseHessenberg computes the inverse of an upper Hessenberg matrix A using a LU factorization method
- Parameters
-
[in] n The order of the matrix A. n >= 0. [in,out] A The array, dimension (STRIDE, n)
- See also
- STRIDE
- Parameters
-
[out] ipiv ipiv is an array of dimension (n). The pivot indices from getHessenbergLU; for 0<=i<=n-1, row i of the matrix was interchanged with row indPiv[i]. [out] info If not zero, an error occured during factorization [out] work A work array that will be overwritten
Definition at line 421 of file complexInverse.cu.
◆ getComplexInverseLU()
| __device__ int getComplexInverseLU | ( | const int | n, |
| cuDoubleComplex *__restrict__ | A, | ||
| const int *__restrict__ | indPivot, | ||
| cuDoubleComplex *__restrict__ | work | ||
| ) |
getComplexInverseLU computes the inverse of a matrix using the LU factorization computed by getHessenbergLU or getComplexLU.
This method inverts U and then computes inv(A) by solving the system inv(A)*L = inv(U) for inv(A).
- Parameters
-
[in] n The order of the matrix A. n >= 0. [in,out] A The array, dimension (STRIDE, n)
- See also
- STRIDE
- Parameters
-
[in] indPivot indPivot is an array of dimension (n). The pivot indices from getHessenbergLU; for 0<=i<=n-1, row i of the matrix was interchanged with row indPiv[i]. [out] work A work array that will be overwritten
Definition at line 270 of file complexInverse.cu.
◆ getComplexLU()
| __device__ void getComplexLU | ( | const int | n, |
| cuDoubleComplex *__restrict__ | A, | ||
| int *__restrict__ | indPivot, | ||
| int *__restrict__ | info | ||
| ) |
Computes the LU factorization of a (n x n) matrix using partial pivoting with row interchanges.
- See also
- STRIDE
- Parameters
-
[in] n The matrix size [in,out] A The matrix to factorize (n x n) with stride defined in solver_props.h
- See also
- STRIDE
- Parameters
-
[out] indPivot indPivot is an array of dimension (n). The pivot indices from getHessenbergLU; for 0<=i<=n-1, row i of the matrix was interchanged with row indPiv[i]. & [out] info An information variable
The factorization has the form: \(A = P * L * U\) where P is a permutation matrix, L is lower triangular with unit diagonal elements (lower trapezoidal if m > n), and U is upper triangular (upper trapezoidal if m < n).
Definition at line 216 of file complexInverse.cu.
◆ getComplexMax()
| __device__ int getComplexMax | ( | const int | n, |
| const cuDoubleComplex *__restrict__ | complexArr | ||
| ) |
getComplexMax finds the index of the first element having maximum absolute value.
- Parameters
-
[in] n The size of complexArr [in] complexArr The (nx1) vector to determine the maximum value of
Definition at line 22 of file complexInverse.cu.
◆ getHessenbergLU()
| __device__ void getHessenbergLU | ( | const int | n, |
| cuDoubleComplex * | A, | ||
| int *__restrict__ | indPivot, | ||
| int *__restrict__ | info | ||
| ) |
Computes the LU factorization of a (n x STRIDE) Hessenberg Matrix using partial pivoting with row interchanges.
- See also
- STRIDE
- Parameters
-
[in] n The matrix size [in,out] A The matrix to factorize (nxn) with stride defined in solver_props.h
- See also
- STRIDE
- Parameters
-
[out] indPivot indPivot is an array of dimension (n). The pivot indices from getHessenbergLU; for 0<=i<=n-1, row i of the matrix was interchanged with row indPiv[i]. [out] info If not zero, an error occured during factorization
The factorization has the form: \(A = P * L * U\) where P is a permutation matrix, L is lower triangular with unit diagonal elements (lower trapezoidal if m > n), and U is upper triangular (upper trapezoidal if m < n). For full reference see: G. W. Stewart, Matrix Algorithms: Volume 1: Basic Decompositions, SIAM, Philadelphia, 1998. doi:10.1137/1.9781611971408.
Definition at line 367 of file complexInverse.cu.
◆ multiplyComplexUpperMV()
| __device__ void multiplyComplexUpperMV | ( | const int | n, |
| cuDoubleComplex * | x, | ||
| const int | lda, | ||
| const cuDoubleComplex * | A | ||
| ) |
Performs the matrix-vector operation \(x_v:= A*x_v\).
- Parameters
-
[in] n On entry, n specifies the order of the matrix A. n must be at least zero. [out] x x is an array of dimension at least (n). Before entry, the incremented array X must contain the n element vector \(x_v\). On exit, X is overwritten with the transformed vector \(x_v\). [in] lda The stride of the matrix
- See also
- STRIDE
- Parameters
-
[in] A A is an array of dimension (lda, n). Before entry the leading n by n upper triangular part of the array A must contain the upper triangular matrix and the strictly lower triangular part of A is not referenced.
Note: These pointers can't use the __restrict__ attribute, as they may overlap
Definition at line 138 of file complexInverse.cu.
◆ scaleComplex()
| __device__ void scaleComplex | ( | const int | n, |
| const cuDoubleComplex | val, | ||
| cuDoubleComplex *__restrict__ | arrX | ||
| ) |
scaleComplex scales a vector (with increment equal to one) by a constant val.
- Parameters
-
[in] n The vector size [out] val The value to scale by [out] arrX The vector to scale
Definition at line 49 of file complexInverse.cu.
